
![]()
![]()
路径规划器


从以上任一应用商店下载以接收自动更新。手动安装可在此处找到。
关于
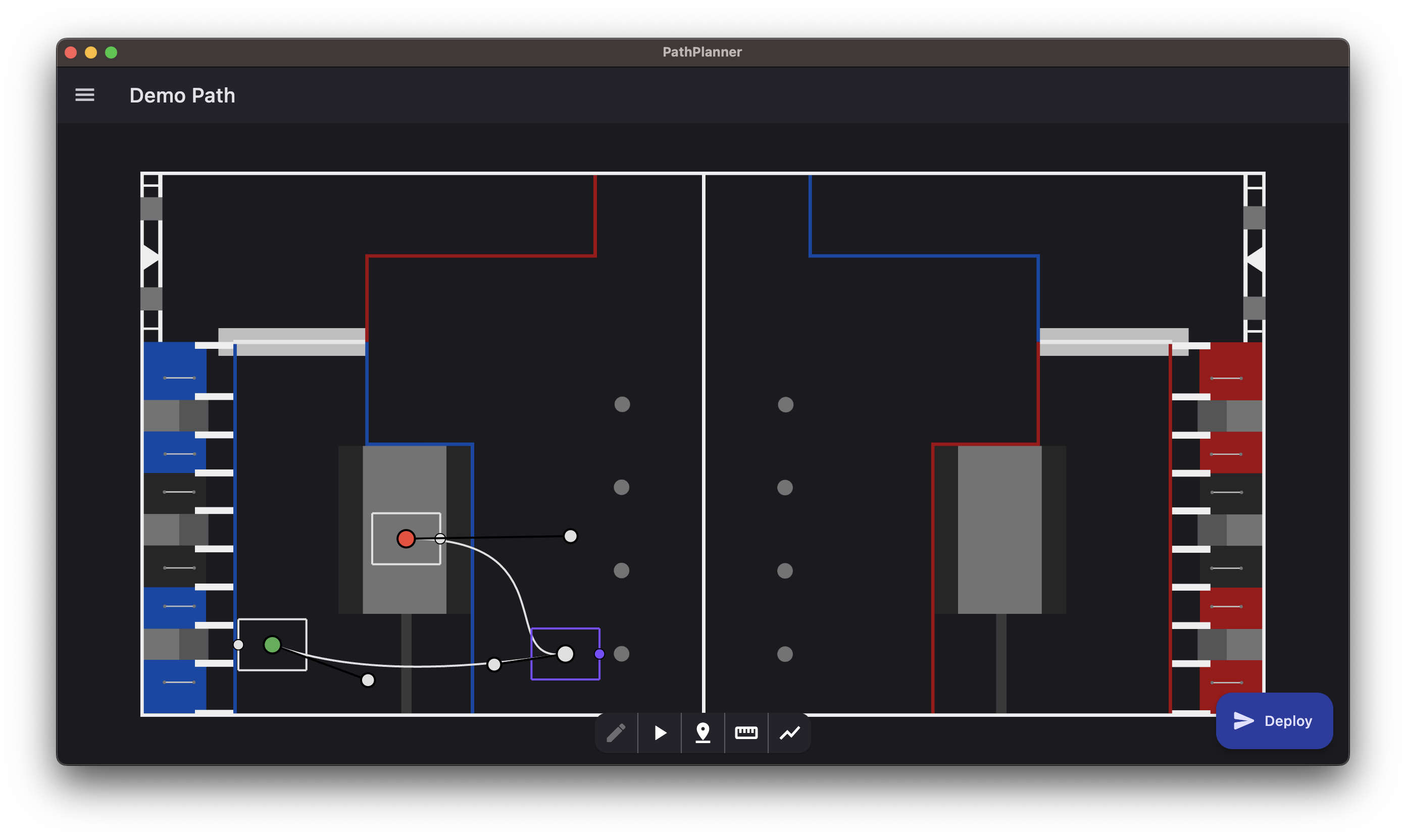 PathPlanner 是一个由 3015 团队创建的 FRC 机器人运动剖面生成器。PathPlanner 的主要功能包括:
PathPlanner 是一个由 3015 团队创建的 FRC 机器人运动剖面生成器。PathPlanner 的主要功能包括:
- 每个路径都使用贝塞尔曲线创建,允许精细调整确切的路径形状。
- 全向模式支持将机器人的旋转与其行进方向分离。
- 实时路径预览
- 允许在路径上放置“事件标记”,这些标记可用于在路径跟随过程中触发其他代码。
- 将路径分成“路径组”,以便单独跟随路径的每个部分。
- 自动路径保存和文件管理
- 机器人端供应商库,用于路径生成和自定义路径跟随命令/控制器
- 使用 PathPlannerLib AutoBuilder 生成完整的自动命令
使用和文档
查看 Wiki
请确保您安装 PathPlannerLib 以生成您的路径。路径可以预先生成为 CSV 或 WPILib JSON 文件,但供应商库使用起来更方便,并且支持 GUI 的所有功能。
如何手动构建
- 安装 Flutter (此项目目前使用 v3.3.9)
- 在终端中打开项目并运行以下命令:
flutter build <PLATFORM>- 有效的平台包括:
- windows
- macOS
- Linux
- 有效的平台包括:
- 构建的应用将位于此处:
- Windows:
<PROJECT DIR>/build/windows/runner/Release - macOS:
<PROJECT DIR>/build/macos/Build/Products/Release - Linux:
<PROJECT DIR>/build/linux/x64/release/bundle
- Windows:
- 或
flutter run以在调试模式下运行




